コンテンツ
はじめに
リハビリテーションの臨床現場において、運動が「できる」か「できないか」という点だけでなく、その「運動の質」は極めて重要な評価指標となります。例えば、対象者が上肢を前方へリーチする際、我々セラピストは単に手が目標に到達したかという最終結果だけでなく、その運動プロセスを詳細に分析します。肩甲上腕関節の運動に伴う肩甲骨の過剰な挙上や、体幹の代償的な側屈が生じていないか。複数の関節運動が協調し、滑らかな軌跡を描けているか。このような運動学的な観察から、患者さんの問題を探していきます。
この動作分析の解像度を、もう一段階引き上げるヒントが、目に見える運動そのものだけでなく、その運動が始まる前に行われる、無意識の準備にあるかもしれません。
我々の脳や神経は、ある動きをしようとするとき、その動きが原因で姿勢が崩れてしまうことを前もって予測します。そして、その姿勢の崩れを打ち消すために、主役となる筋肉が動くよりも先に、姿勢を支える多くの筋肉の働きを調整します。この一連の、運動に先立って行われる予測的な体の調節機能が、「予測的姿勢調節(Anticipatory Postural Adjustments、以下APA)」です。
このAPAの理解は、私たちの臨床的視点を「反応の分析」から「予測の理解」へとシフトさせます。我々の動作分析は、よく代償運動の発見に多くの時間を費やしますが、代償とは何かが失敗した「後」の反応です。臨床家としての我々の目標は、代償を分析することではなく、代償を必要としない効率的な運動パターンを再学習させることです。そのためには、失敗の後の反応ではなく、成功の前の「準備」、すなわちフィードフォワード制御としてのAPAを理解する必要があります。
本稿の目的は、このAPAの普遍性と精緻性を、これまで見過ごされてきた「指一本の微細運動」という領域で初めて明らかにした論文、Caronni & Cavallari (2009)を通して、APAという視点が我々の臨床にいかなる変革をもたらすのかを考察します。
研究の概要と方法論的特異性
研究の根源的問い:指一本の動きにも、姿勢制御は必要か?
予測的姿勢調節(APA)に関する先行研究の多くは、立位での腕の挙上や体幹の運動といった、大きな質量を持つ身体分節の、速くて大きな運動に焦点を当ててきました 。これらの研究により、APAが全身の平衡を維持するために不可欠な神経メカニズムであることは広く知られていました。
この研究背景に基づき、著者らはこれまで検証されてこなかった微細運動の領域に焦点を当てました。理論上は相互作用トルクが生じるはずの「人差し指の軽微な屈曲」のような運動において、実際に姿勢は影響を受けるのか、そしてそれに対する予測的な制御は存在するのか。この根源的な問いに答えるため、本研究は以下の三点を検証することを目的としています。
3つの異なる手法による多角的な検証
APAは、運動に先立つ無意識下の準備活動であるため、その存在と機能を証明することは容易ではありません。この課題を克服するため、著者らは3つの異なるアプローチを組み合わせる、きわめて巧妙な実験デザインを構築しました。
- コンピューター上での力学モデルによる予測
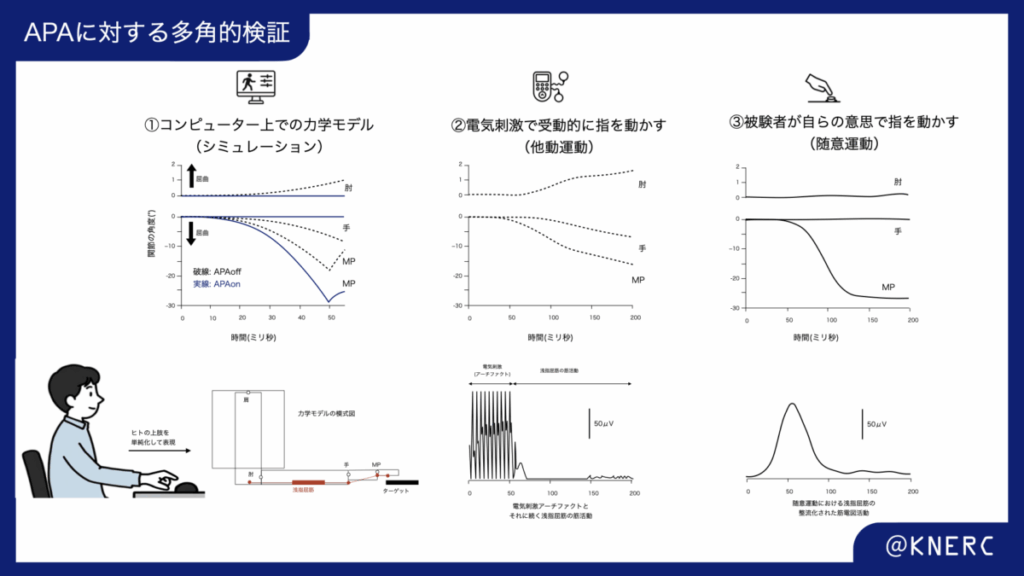
まず、著者らはコンピューター上に腕の力学モデルを構築しました 。この仮想の腕には、APAという神経制御システムは存在しません。このモデルを用いて指を動かすと、「もしAPAがなかったら、物理法則に従えば腕はどう動くはずか」を予測できます。これは、これから検証すべき「問題」の大きさを定義する役割を果たします。 - 電気刺激による現象の再現
次に、モデルの予測が現実世界でも起こるかを確認するため、被験者の意思とは関係なく、神経への電気刺激によって強制的に指を動かしました 。これにより、APAを含まない純粋な運動が引き起こされ、その結果生じる腕のブレ(受動的な関節運動)を実測します 。これは、モデルが予測した「問題」が、現実の身体でも確かに存在することの証明となります。 - 随意運動による機能の証明
最後に、被験者が自らの意思で指を動かす際の、実際の運動を計測します 。前二者で「問題」の存在が確認されているにもかかわらず、この随意運動では腕のブレがほとんど生じないことを示せば、それは脳が何らかの補償メカニズムを用いた動かぬ証拠となります 。そのメカニズムこそがAPAであり、筋電図はその直接的な証拠を捉えるのです。
この3つのアプローチは、①力学モデルで問題を予測し、②受動運動でその問題の存在を実証し、③随意運動で脳による解決策(APA)を証明するという、段階的で論理的な役割を担っています。この系統的な検証プロセスが、本研究の結論を強固なものにしています。
論文が明らかにした3つの主たる知見
知見①:相互作用トルクの普遍性
本研究の最初の発見は、人差し指一本の軽微な運動でさえ、上肢全体の姿勢を乱すのに十分な力学的影響(相互作用トルク)を生じさせるという事実です。
このことは、図1の比較によって明確に示されています。まず、APAの機能を持たない力学モデル(図1①の破線)と、電気刺激による受動的な運動(図1②)では、指の屈曲に伴い、手関節と肘関節に意図しない屈曲がはっきりと生じました 。特に力学モデルでは、手関節に約7°の屈曲が見られています 。
しかし、被験者が自らの意思で指を動かした随意運動(図1③)では、これらの手関節や肘関節のブレはほぼ完全に消失していました 。この対比は、私たちの神経系が、微細な運動によって生じる相互作用トルクを常に予測し、それを打ち消すための制御を行っていることを強力に示唆しています。
知見②:予測的姿勢調節(APA)の精緻性
第2の発見は、前述の相互作用トルクを相殺するメカニズムが、主動作に先行する、広範かつ精巧な予測的姿勢調節(APA)の連鎖であることです。
筋電図の解析により、指を動かす主動筋である浅指屈筋が活動するよりも数十ミリ秒前に、上肢の複数の姿勢筋が予測的に活動を開始していることが明らかになりました 。このAPAのパターンは、状況に応じて機能的に変化する、きわめて精緻なものでした。
筋電図の解析により、指を動かす主動筋である浅指屈筋が活動するよりも数十ミリ秒前に、上肢の複数の姿勢筋が予測的に活動を開始していることが明らかになりました 。このAPAのパターンは、状況に応じて機能的に変化する、きわめて精緻なものでした。
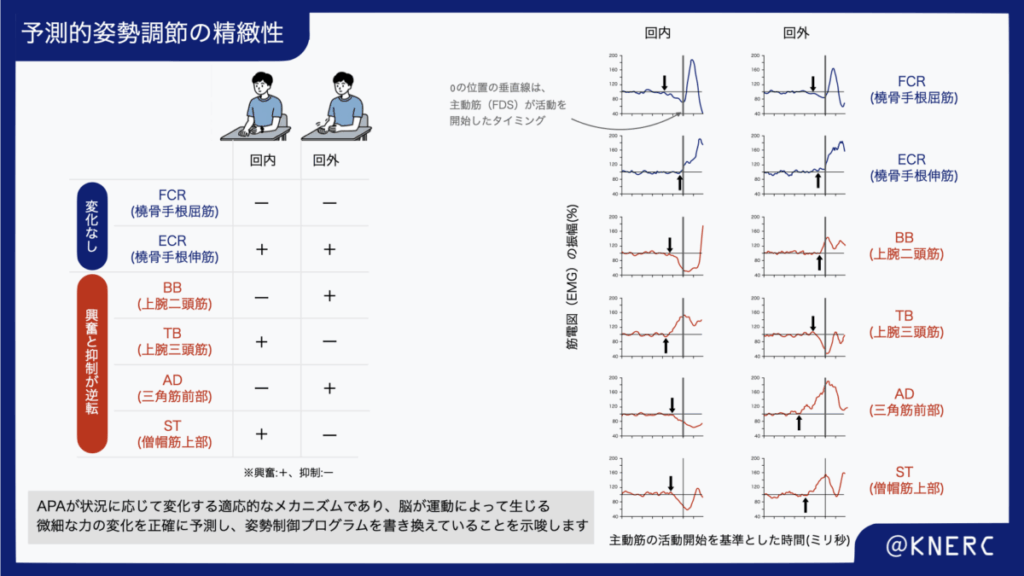
- 手の回内位でのAPA
- 手の回外位でのAPA:
これらの結果は、APAが単なる反射ではなく、これから行う運動の特性や身体の状況を正確に計算した上で実行される、高度なフィードフォワード制御であることを示しています。
知見③: 運動の正確性への貢献
本研究における第3の、そして臨床的に最も重要な発見は、APAが単に姿勢を安定させるだけでなく、運動そのものの「正確性」に直接的に寄与しているという点です。
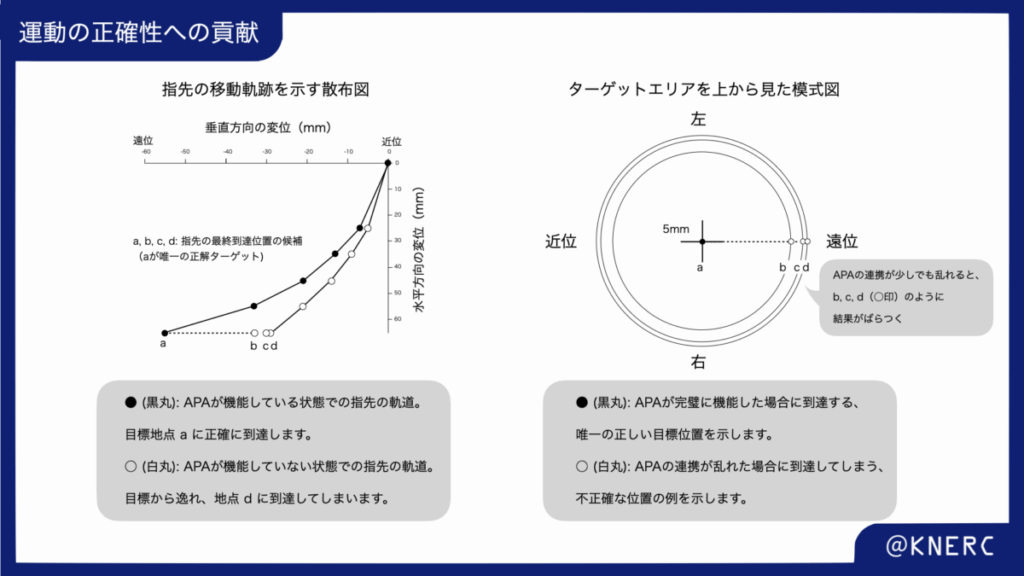
一見、軽微で単純な「人差し指でテーブルをタップする」だけの運動であっても、その直前に適切なAPAが働くかどうかによって、指先の着地位置が大きく変化することが示されました。
図3aに示されたシミュレーションでは、APAが完全に働いて関節が安定している状態と、APAがない状態とを比較した結果、指先の最終到達点に最大26mmものズレが生じることが明らかとなりました。
一方、姿勢が安定し、近位関節が固定されている状態では、指先は目標に対して極めて正確に到達しました。さらに、関節の固定範囲を変えた条件では、固定する部位が多いほどズレが小さくなるという段階的な変化も観察されました。
この結果は、APAが“姿勢の安定”という間接的な貢献にとどまらず、運動の正確性に直接関与していることを示しています。
これは、もしAPAによる姿勢の安定化がなければ、私たちは正確に指で目標をタップすることができない、すなわち運動失調に似た状態に陥ることを意味します。この発見は、APAが姿勢制御という裏方の役割を超えて、意図した運動の軌道と終点を保証するという、運動の質に直結する極めて重要な役割を担っていることを証明しました。
先行研究との比較と臨床的意義の深掘り
先行研究との比較
類似点:APAにおける古典的原則の再確認
Massion (1992) によって提唱された「全ての運動は、姿勢に影響を与える相互作用トルクを伴う」という大原則です 。本研究は、この原則が指一本という微細な運動にさえも当てはまることを実証しました 。
その上で、本研究で観察されたAPAの特性は、過去の代表的な研究で示された原則と多くの点で一致しています。
姿勢の安定性との関連
本研究では、前腕をアームレストで支持すると僧帽筋のAPAが消失しました。これは、Slijper and Latash (2000) らが示した「身体の支持点を増やして安定性を高めるとAPAは抑制される」という原則と一致します 。
運動方向との関連
手の向きを回内から回外へ変えた際にAPAのパターンが反転した結果は、Aruin and Latash (1995) らが示した「運動方向に応じてAPAの筋活動パターンは反転する」という原則の正しさを裏付ける報告と一致します。
古典的特性
本研究のAPAは、Cordo and Nashner (1982) らの研究に代表されるAPAの主要3特性(①複数筋への分散、②安定性に応じた振幅変化、③運動方向に応じたパターン反転)をすべて満たしており、これが普遍的なメカニズムであることを示しています
相違点:微細運動領域へのパラダイムシフト
本研究の最大の貢献は、APA研究に二つのパラダイムシフトをもたらした点にあります。
第1に、研究対象を、従来の「大きな運動」から「指一本の微細運動」へと拡張したことです。これにより、APAが全身の平衡維持だけでなく、身体各部の局所的な運動においても不可欠な制御であることが示されました。
第二に、APAの「役割」の解釈です。先行研究がAPAを主に「平衡維持」という防御的な役割で論じてきたのに対し、本研究はシミュレーション結果(図3)を基に、APAが「焦点運動の精度」そのものを保証する、より積極的な役割を担うことを示しました。この視点の転換は、APAの重要性を再定義するものです。
臨床的意義:運動失調(Dysmetria)の再解釈
本研究の知見は、「指を動かす」といった非常に小さな動きでさえ、それを支える予測的姿勢調節(APA)が機能不全に陥れば、運動全体が破綻しうるという、臨床的に極めて重要な事実を明らかにしました。
このことは、運動失調(Dysmetria)の病態解釈に新たな視点を提供します。シミュレーションでは、APAという予測的な準備活動がなければ、運動そのものが測定過大という形で破綻してしまうことが示されています。
これは、私たちが臨床で評価する「正常な動きの構成要素」が、目に見える運動実行の側面だけでなく、それに先行する微細な運動に対するAPAという、目に見えない準備段階にまで及ぶことを意味します。つまり、患者さんの巧緻運動における不正確さ(運動失調)を分析する際、私たちはその小さな動きの裏で働く、APAという名の姿勢制御メカニズムの働きまで考慮に入れる必要があるのです。
結論 – 本研究の知見を臨床に活かすために
本稿の要約:APAがもたらす臨床思考の変革
本稿では、Caronni & Cavallari (2009)による画期的な論文を精読し、予測的姿勢調節(APA)に関する以下の重要な知見を確認しました。
この論文が示したのは、私たちの全ての随意運動が、その実行に先立つ無意識下の精緻な「準備」に支えられているという事実です。この視点は、我々セラピストが「動きの質」を捉える上で、臨床思考を新たな段階へと引き上げてくれます。
さらなる学びへ
この記事では、指一本の動きを支える予測的姿勢調節(APA)の精巧なメカニズムを見てきました。この「運動前の準備」という原則は、指先の微細運動だけでなく、脳卒中患者さんのリハビリテーションで我々が日々向き合う、より大きな課題、すなわち立位制御においても極めて重要です。
日常生活に欠かせない「立つ」「動き出す」ための姿勢制御。あなたは、その評価と介入に確かな理由を持てていますか?“なんとなく触る”から、“理由をもって介入する”ために。理論と実践を繋ぐ、以下の実践型講習会で一緒に学びを深めましょう。
【講習会のご案内】
テーマ: 立位分析の精度を上げる -論文で深めるハンドリングと評価と視点-
日 時: 2025年9月7日(日)10:00〜17:00
会 場: KNERC(京都府)
講 師: 大村 衡史先生(作業療法士)、橋谷裕太郎(理学療法士)
対 象: 脳卒中リハビリに携わる療法士(PT, OT, ST)
料 金:
・対面受講: 7,700円(税込)会員割引あり
(特典: 復習サポートAI、英語論文プロンプト集、論文の読み方ガイド付き)
・オンライン受講(アーカイブ): 3,300円(税込)プレミアム会員は無料
特 徴: “なんとなく触る”から、“理由をもって介入する”へ。脳卒中患者さんの立位制御に焦点を当て、評価とハンドリングの精度を高めます。
詳細な注意事項、キャンセルポリシー、お申し込み方法については、以下のリンクをご確認ください。
(https://forms.gle/d6k2CMx9PVmXyyJU6)
※本稿は、KNERCのオンラインサロン「ネルク・ベース」に投稿された記事・動画を基に、加筆・修正を行ったものです。
- コラム【論文紹介】指一本の動きに必要なAPAとは・・・?】2025/08/03
- ※サロンメンバーは直接URLをクリックすれば記事へアクセスできます。
- KNERC 橋谷裕太郎
Q&A
-
予測的姿勢調節(APA)とは、一言でいうと何ですか?
-
運動を始める「前」に、その運動によって身体がブレてしまわないように、脳が無意識に行う「転ばぬ先の杖」のような準備活動のことです 。主役の筋肉が動くよりも先に、他の筋肉を準備させることで、スムーズで正確な運動を実現します。
-
なぜ「指一本」という非常に小さな動きを研究したのですか?臨床とどう関係しますか?
-
この研究は、「指一本」というごく小さな動きでさえ、腕全体に及ぶ精巧なAPAに支えられていることを証明しました 。これにより、APAが大きな運動だけでなく、あらゆる運動に共通する普遍的な制御メカニズムであることが分かりました。
-
シミュレーション(図3)では、APAsがない場合にどのような運動のズレが生じましたか?
-
シミュレーションでは、APAsによる補償がない(近位の関節が自由に回転する)場合、以下の運動のズレが示されました。
-
シミュレーションで生じた運動のズレ(例:振幅の減少や到達位置のずれ)の直接的な原因は何ですか?
-
直接的な原因は、指の焦点運動によって発生する「相互作用トルク」が補償されないことです。APAsが不足すると、指の動きによって生じる力が手首や肘などの近位関節を意図せず回転させ、それが指の意図した動きの妨げとなり、結果として振幅の減少や指先の最終位置のずれにつながります。通常、このようなズレはAPAsによって未然に防がれます。
-
この研究結果を臨床で使う上での、一番の注意点は何ですか?
-
一番の注意点は、この研究が健常な成人を対象としている点です。そのため、「APAの機能不全が運動失調の原因となりうる」という結論は、現段階では強力な「仮説」です 。この知見を患者さんに当てはめる際は、科学的根拠に基づいた「臨床仮説」として用い、実際の患者さんの反応を注意深く評価する必要があります。